New Robotics Course Materials
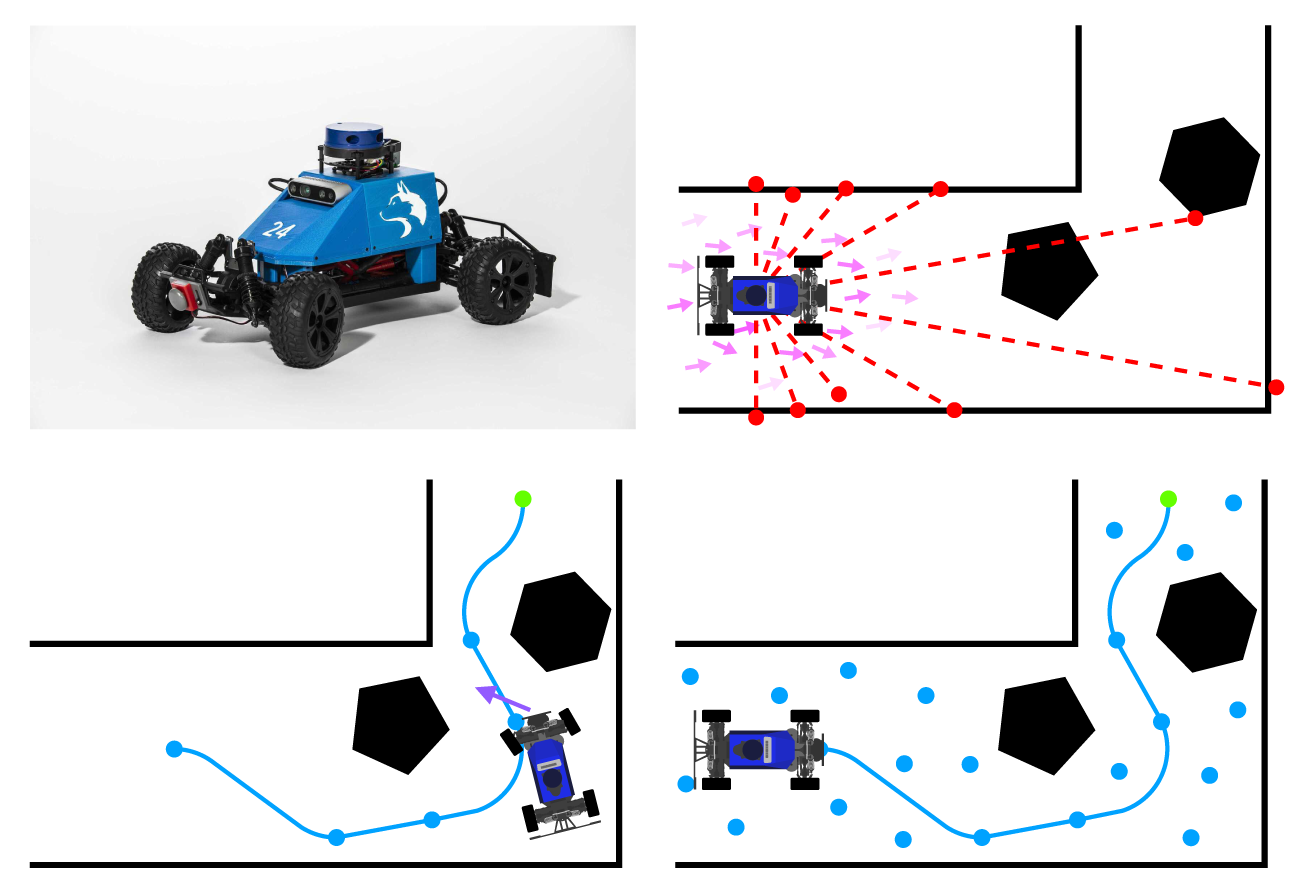
The four course assignments trace the steps necessary to get a mobile robot to localize, generate motion plans, and robustly execute them.
I helped put on UW’s undergrad robotics class this spring, working as one of several TAs to revamp the course projects for a fully virtual, simulation-only format. Thanks to the incredible platform and software work from the MuSHR team, we were able to create a buttery experience. I don’t know of any other educational stack that provides high-quality tests and scaffolding that can guide students in implementing a particle filter, controller and planner for a mobile robot—using ROS Noetic and Python 3, no less. All on top of a simulator that’s lightweight enough to run smoothly in an Ubuntu VM on just about any laptop. I think the materials and approach here should be the starting place for any class that’s trying to get students familiar with the important ideas in autonomous robotics and robot software.