Influencing Behavioral Attributions Paper at ICRA Workshop
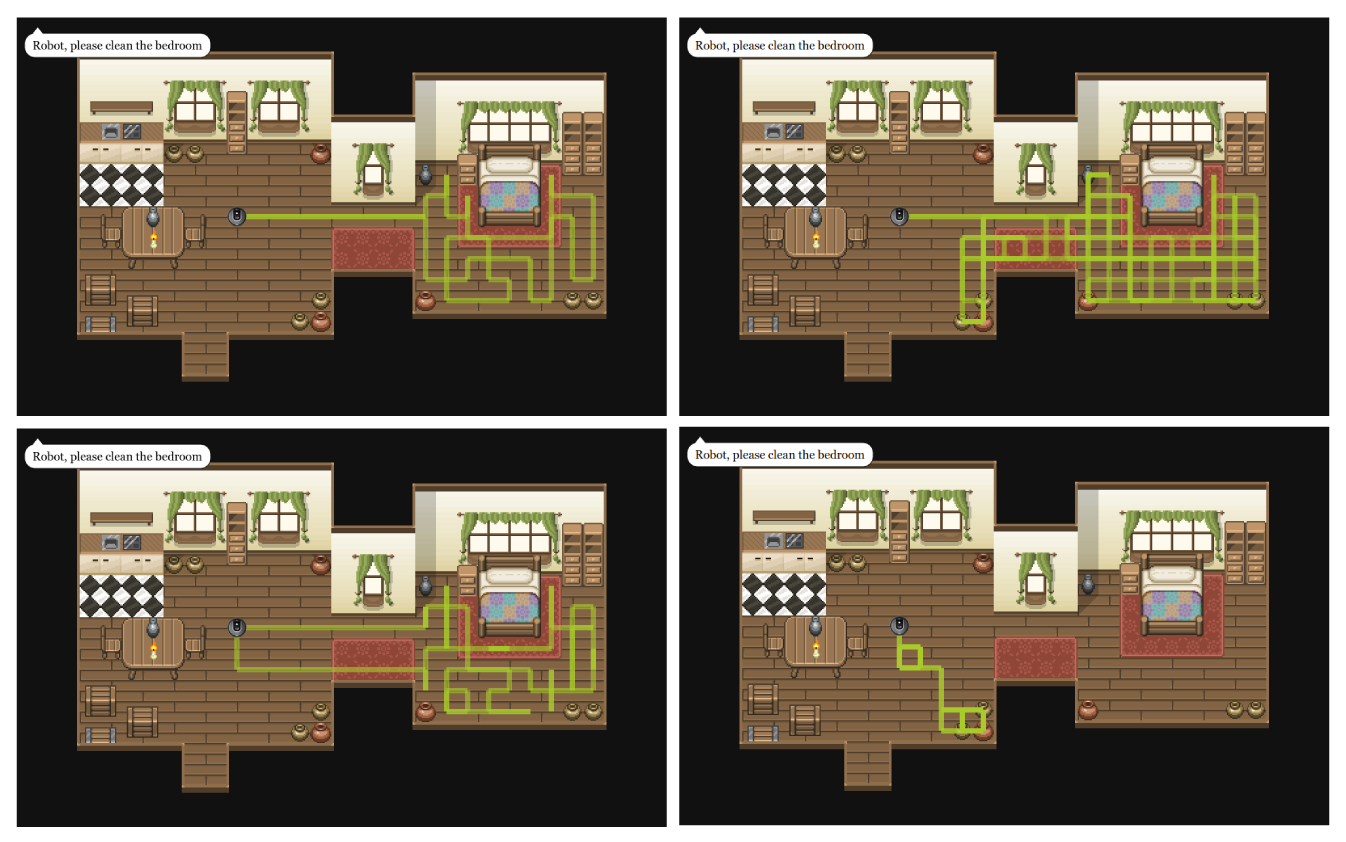
We investigate how people perceive different coverage trajectories in a virtual home vacuuming domain.
We have a new short paper summarizing our first experiments with modeling and controlling how a robot’s motion impacts the impressions formed by observers.
#news
#uw
#research